工程集約と簡単 · 省スペースな
ロボットにより高い生産性を実現
POINT 01
- 工程集約により段取り · 工程間の
搬送回数を削減 -
- サブ主軸を用いて1 · 2工程を1台で完結
- 段取り · 工程間搬送の回数を最小化し
作業の手間と工程間の取り付け誤差を削減
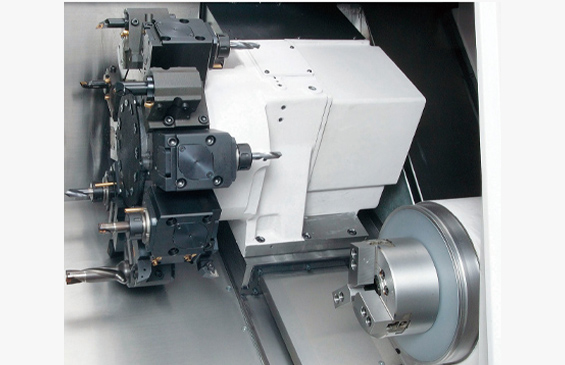
POINT 02
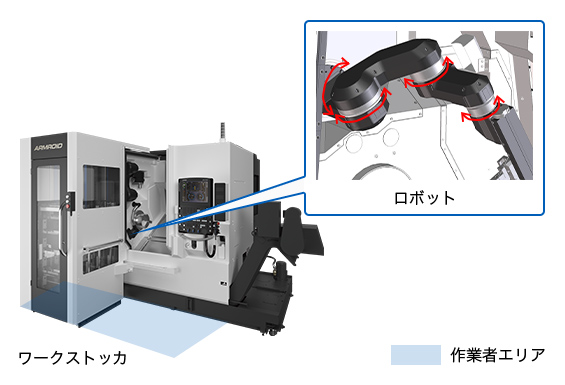
- 工作機械とビルトインロボットの
融合により省スペースな自動化を実現 -
- 加工室内に搭載したロボットで
部品の着脱などを自動化 - 機械前面に退避可能なワークストッカを設置
- ストッカが作業者エリアに収まるため
ロボットを利用しない場合と
同等のスペースで自動化を実現
- 加工室内に搭載したロボットで
POINT 03
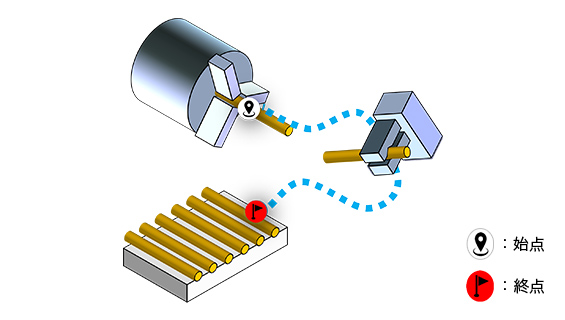
- ロボット作業の経験がないオペレータでも
簡単なロボット操作 -
- 始点と終点の2点をティーチングするだけで
NCがぶつからない経路を自動生成 - 工作機械のパルスハンドルで
ロボットを操作できるため
簡単にロボット操作可能
- 始点と終点の2点をティーチングするだけで