
ロボット搭載の複合加工機
工程集約と自動化を省スペースで実現
POINT 01
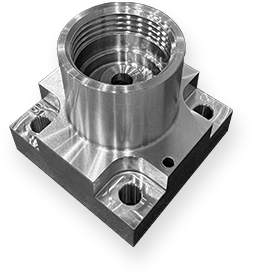
- 斜め穴、バリ取り、バニシング加工の
工程集約により手作業を削減 -
- 複合加工機による斜め穴加工の工程集約で
段取り時間を削減 - 機械加工によるバリ取りで作業者の負担、
品質のばらつきを削減 - 表面を押しならして面粗度を向上するバニシングによる
シール面仕上げ加工も集約
- 複合加工機による斜め穴加工の工程集約で
複合加工機による工程集約
POINT 02
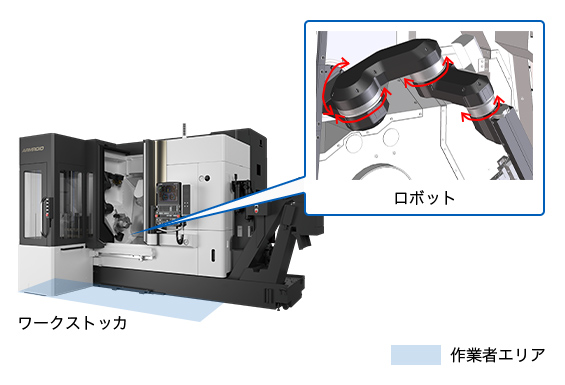
- 工作機械とビルトインロボットの
融合により省スペースな自動化を実現 -
- 加工室内に搭載したロボットで
部品の着脱などを自動化 - 機械前面に移動可能なワークストッカを設置
- ワークストッカが作業者エリアに収まるため
ロボットを利用しない場合と
同等のスペースで自動化を実現
- 加工室内に搭載したロボットで
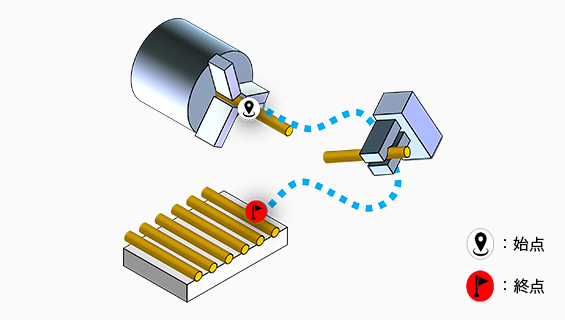
POINT 03
- ロボット作業の経験がないオペレータでも
簡単なロボット操作 -
- 始点と終点の2点をティーチングするだけで
NCがぶつからない経路を自動生成 - 工作機械のパルスハンドルでロボットを操作できるため
簡単にロボットを扱うことが可能
- 始点と終点の2点をティーチングするだけで