製品カテゴリ
自動化移動式協働ロボット

動画で見る製品・技術情報

- OMR series
- オークマの協働ロボットOMRシリーズは、自動化を手軽に、コンパクトに実現します。
自動化を手軽に、 コンパクトに
| 必要な時に手軽に加工機を自動化 | プログラミング不要で専用画面に 各種情報を登録するだけ | 段取り替えレスで非稼働時間を短縮 |

手軽に自動化を実現する4つのポイント
| POINT | 1 |

| 新規ワーク登録時の ティーチングが不要 |
ガイダンスに従って加工機やワークの情報を入力することで新規ワーク情報を登録。
最大30種まで登録でき、ワンアクションで切り替え可能です。
| POINT | 2 |

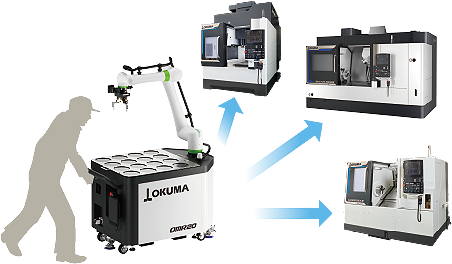
| 繁忙状況に合わせて フレキシブルに自動化 |
加工機をあらかじめ登録(最大10台)しておけば、変種変量生産にも柔軟に対応。昼間はオペレーターによる加工、夜間はロボットでの自動運転も可能です。
| POINT | 3 |

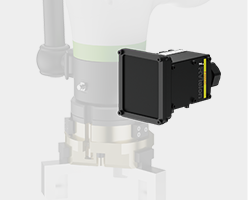
| ビジョンセンサが 設置位置を自動補正 |
設置はフロアストッパでワンタッチ。
電源・通信ケーブル、エアホースを接続して生産開始。
加工機とロボットの位置はビジョンセンサが自動補正します。

| POINT | 4 |

| 幅広いワークサイズに 対応したストッカ |
幅広いワークサイズに対応できるストッカを採用することでワーク切り替え時のストッカ段取り時間を削減。
上部の天板を取り替えることで異なるワーク形状、個数に対応できます。

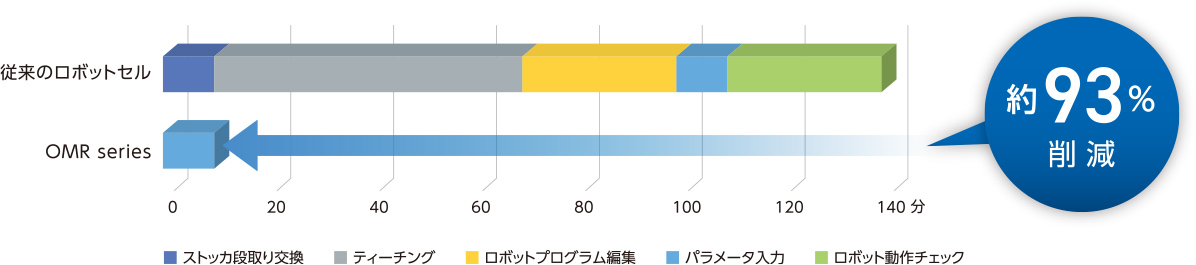
立上げ時間の大幅短縮
機械切替時間は4.5分で完了
ラフな位置決めでもビジョンセンサでドットパターン治具を読み取りロボット教示位置を補正。
ロボット移設後の位置合わせ作業を容易にします。


*1 ドットパターン治具は機械前面に貼り付けられています。
*2 加工機、ワークの情報はあらかじめ登録しておく必要があります。(登録数は最大10台)
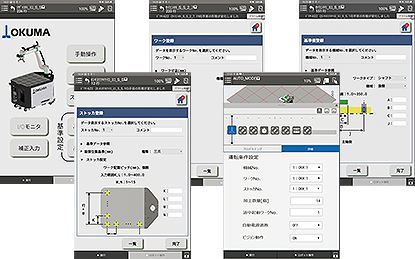
専用画面に各種情報を登録。
ワーク切り替え時のプログラミング不要。
ワークの登録情報を読み込んでロボットの教示位置を自動でオフセットするため、ワーク切り替え時のプログラミングが必要ありません。
ワークは30種まで登録可能です。

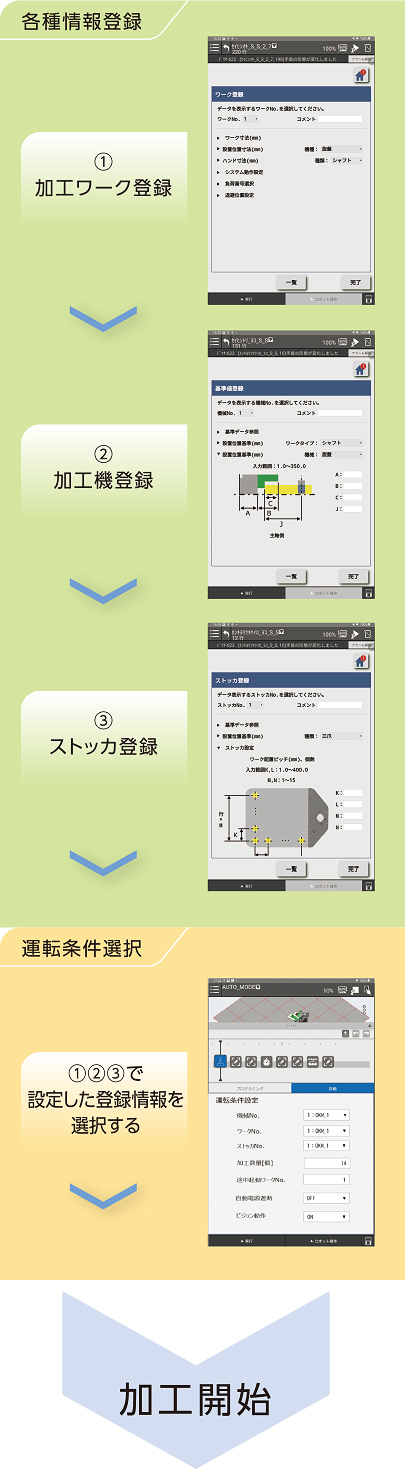
| ガイダンスに沿った | パラメータの入力により最短 | 10分 | で新規ワークの立上が完了 |
 |
※画像は左右にスクロールします
※加工機のチャックと爪の交換、ロボットのワークハンドの交換がない場合のグラフです。
仕様
| 項目 | 単位 | OMR10 | OMR20 | |||
| ワークハンド | 3爪ハンド | 平行ハンド | 3爪ハンド | 平行ハンド | ||
| ワーク可搬質量 | kg | 5 | 10 | |||
| 可搬ワークサイズ | ワーク径 | mm | ø30~150 | ø20~80 | ø30~150 | ø20~80 |
| ワーク長 | mm | 20~80 | 120~350 | 20~80 | 120~350 | |
| ロボット架台サイズ | mm | W810 × D1,345 × H800 | ||||
| ワークストッカサイズ | mm | W792 × D848 | ||||
※表は左右にスクロールします
カタログダウンロード
機械仕様や製品の特長・搭載機能を製品カタログで詳しくご案内しています!
以下の入力フォームに必要事項をご記入の上、送信していただくと、ご記入いただいたメールアドレス宛に、カタログダウンロード用のURLをお送りします。

