- HOME
- OKUMA的智能化技术
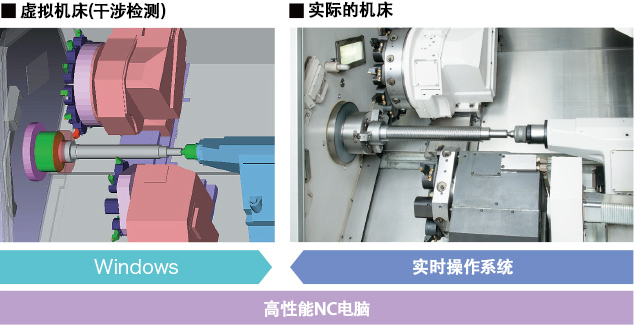
- Collision Avoidance System
OKUMA的智能化技术

- 任何人都可“专心地进行加工”
- 无论自动运转或是手动运转,防止任何情况下的撞机。
保护机床远离撞机的危险,为用户提供"不会撞机"的安全感。
-
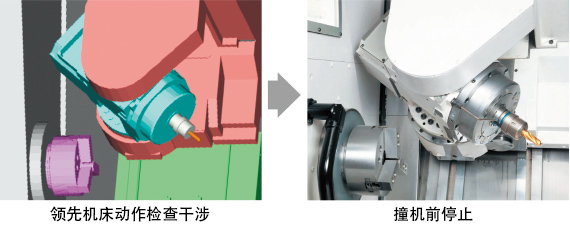
- 自动运转模式下防止撞机
- 领先识别NC程序,并检测登录了NC设定的原点补偿值、刀具补偿值的轴移动指令是否存在干涉。在发生撞机前使机床动作暂时停止。
-
- 手动操作排除撞机可能
- 即使是装夹时的手动运转状态,也能在发生撞机前的一瞬间停止机床动作。
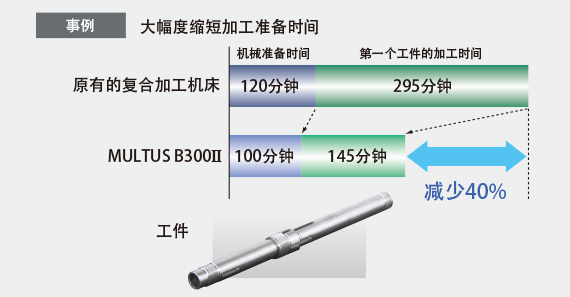
作业人员不必担心会发生撞机,可以专心作业,从而大大缩短了加工准备时间。
-
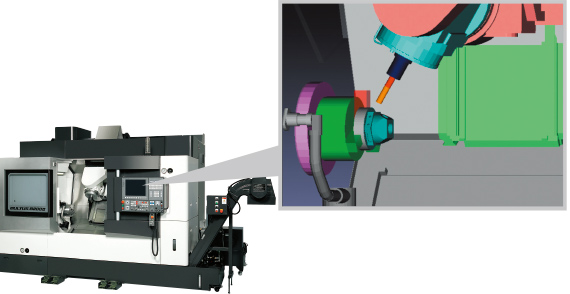
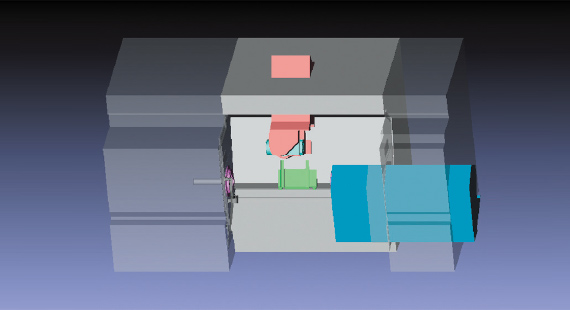
- 工件切削也同样进行实时模拟
- 还能准确捕捉加工过程中的工件形状以检查干涉。
-
- 减少“机床的停止时间”
- 主轴或刀盘等部件接近时,操作人员减少干涉检测。
以缩短试件加工时间。
- 丰富的可放心使用的功能
- 简单输入工装信息!简单模型建立功能
-
-
- 1.机床(完成设定)
-
- 机床的3D模型已登录完毕
- 起动时,自动地选择设定
-
- 2.选择卡盘(夹具)
-
- 标准卡盘的3D模型登录完毕
- 从已登录的3D模型中选择输入
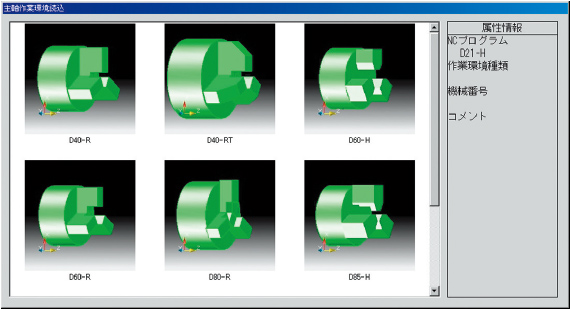
也可利用CAD制作的3D模型(STL格式)进行读入 -
- 3.选择刀具
-
- 标准刀具的3D模型已登录完毕
- 从已登录的3D模型中选择输入
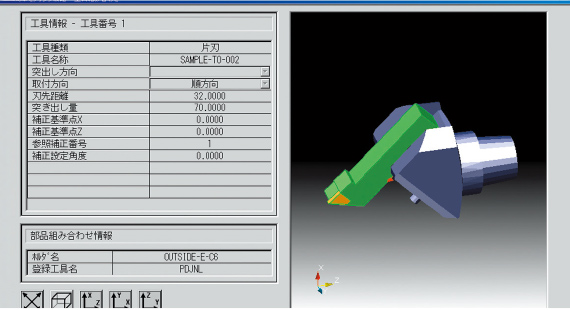
通过输入轮廓(外形)形状生成,也可以用CAD制成的3D模型(STL格式)进行读取。 -
- 4.输入毛坯
-
- 交互输入基本形状
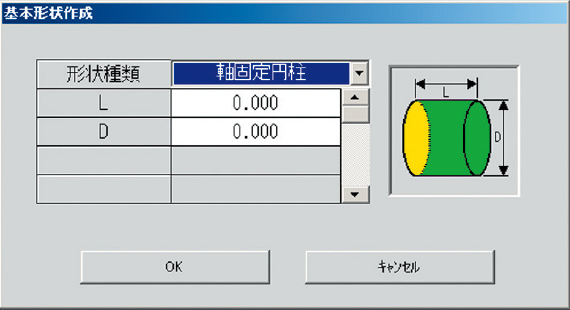
也可利用CAD制作的3D模型(STL格式)进行读入
-
应用事例
-
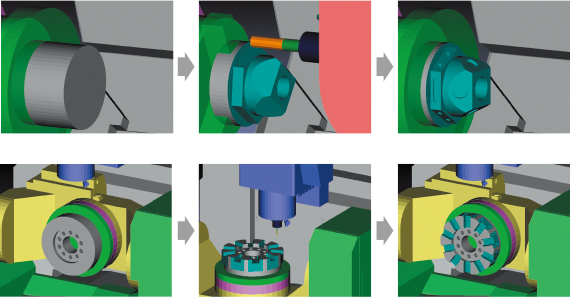
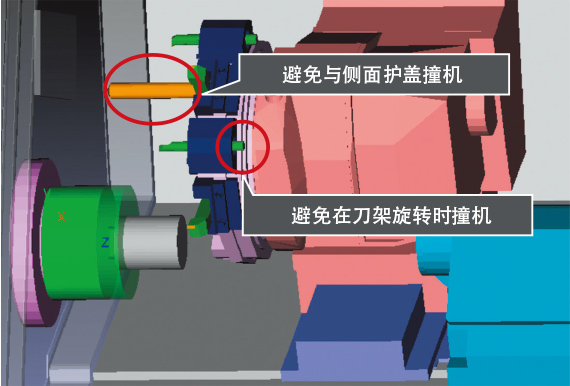
- 刀架旋转、移动时的防止撞机
- 可防止伴随刀架的旋转、移动动作,长刀具所发生的无法预期的撞机。操作人员可专心地进行加工确认。
-
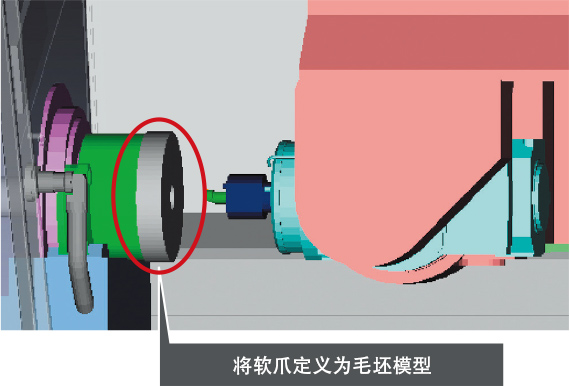
- 软爪加工时的干涉检测
- 由于卡爪属于夹具模型,所以通常在加工软爪时是无法应用Collision Avoidance System的,此时就需要把卡爪形状定义为毛坯模型,便可运用Collision Avoidance System了。
- 注意事项
- Collision Avoidance System是根据OSP内部机械构件、刀具、夹具、工件的3D模型检测撞机的一种系统。因此,当输入系统的刀具、夹具、工件的形状与实际形状不相符时,对撞机的检测也将无法正常进行。而且,还有可能出现对撞机检测对象的部件、动作等的限制。